大阪工業大学
楕円型ハーネスの形態最適化による盲導犬とユーザーの快適な歩行の実現に関する基礎的研究
坂田 紘一 / 空間デザイン学科 構造デザイン研究室
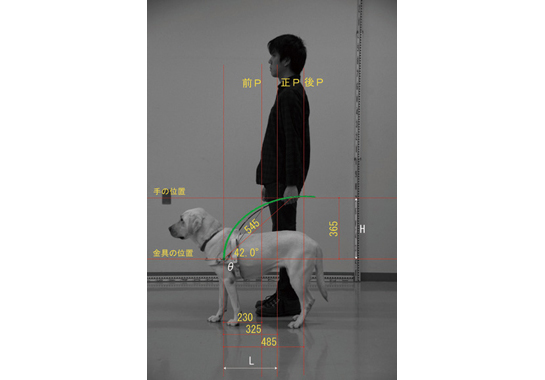
盲導犬ハーネスに関する研究は非常に少なく、ユーザーへの負担を軽減するハーネスを提案しているが、盲導犬の負担をも軽減する提案には至っていない。本学では、2013年に「盲導犬プロジェクト」を立ち上げ、兵庫盲導犬協会と共同で盲導犬とユーザーの快適な歩行の実現に取組んでいる。本研究はユーザーと盲導犬の双方の負担を軽減するハーネスを開発することを目指し、最適化の手法を用いて最適なハーネスの形態を得ることを目的としている。
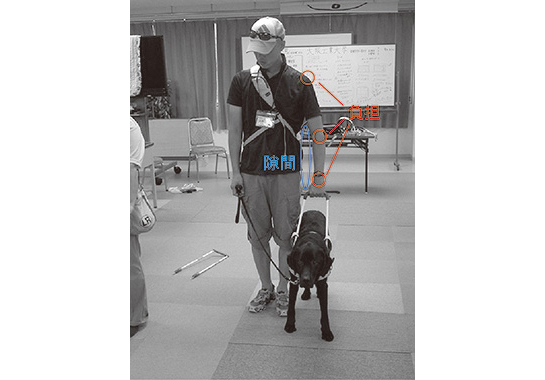
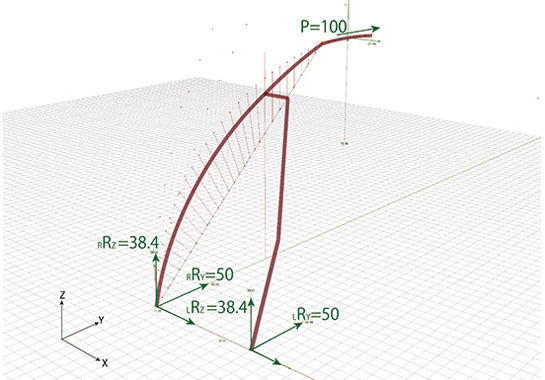
その成果としては盲導犬とユーザーの位置関係を把握し、その結果より楕円型ハーネスのプロトタイプを製作し、ユーザーの肩等への負担を軽減することができた。この楕円型ハーネスを基に形態最適化を行い、盲導犬の負担を軽減することが可能なハーネス形態を得ることができた。
今後、盲導犬の負担の定量化と製作方法を合理化できるハーネス形態の追究が課題である。



















