大阪工業大学
大阪工業大学 工学部 空間デザイン学科 第12回 卒業作品展
物理演算に基づく海洋生物の行動シミュレーション ー深海エレベーターのための映像ー
- 塩見 麻友
- 構造デザイン研究室
【序論】
KangarooとはRhinocerosとGrasshopper上で動く物理演算シミュレーターである。Grasshopperで海洋生物のモデルを構築し、Kangarooで動解析・衝突・形態探査などの物理演算に基づいて変形するシミュレーションができる。さらに、海洋生物のモデルに行動アルゴリズムを用いると、滑らかに動く魚のシミュレーションを行うことができる。一方、視覚に障害のある人は魚の形態的特徴をあまりよく知らない。しかし弱視の人は詳しい形までは見えないが、水槽の中の泳ぐ魚の姿をなんとなく追うことができる。
本研究では、行動シミュレーションを活かし視覚障害者の人でも魚のイメージを広げ、見て楽しむ作品を提案することが目的である。
【行動モデル】
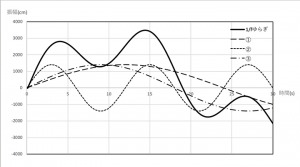
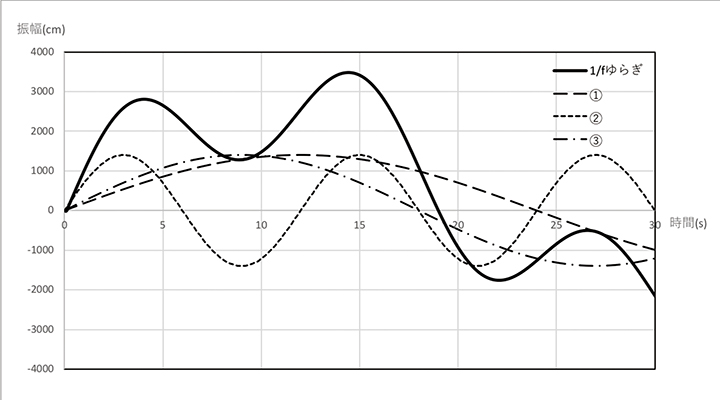
イワシの行動モデルの検討を行う。イワシの群れの形態と行動制御を定義する。イワシの群れはニシン科のイワシやカタクチイワシ科のアンチョビで作られていて、球状や竜巻状に形を変え捕食者から身を守るために群れをなします。形態(境界)は300×100cmの楕円形とする。行動制御は衝突を用い境界と個体の衝突判定を設定する。GrasshopperのKangarooからCurve point collideコンポーネントでイワシが常に楕円形の内側にあることを指定する。さらにイワシの群の遊泳速度を定義する。魚群行動は1/fゆらぎを用いる。1/fゆらぎとは、ゆらぎの波形パワースペクトルが周波数に反比例することである。ある量が平均値を中心にして時間的または空間的に変動する現象として定義されている。ここで1/fゆらぎはSin波3波の重ね合わせを用いる。
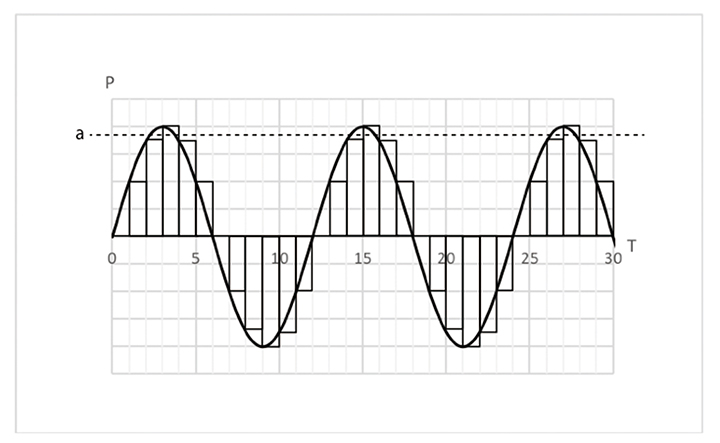
次にクラゲの行動モデルの検討を行う。クラゲは浮遊生活をするプランクトンである。体は柔らかく透明で、傘のような形をしている。形態(境界)は半径100cmの円形とし、circleコンポーネントで平面と半径を定義する。クラゲの群れの行動制御を定義する。クラゲは傘を広げたり縮ませたりして動いていて、同じ種類のクラゲでも成長段階により速さが微妙に違う。このクラゲの動きを表現するため3種類のリズムを作る。さらに3種類のリズムにパルス荷重を用いる。パルス荷重とは正弦波がある一定の値を超えると働く力のことである。これをPick’n’Chooseコンポーネントにつなげることで、指定したサインカーブから0.95以上のデータを順番に取り出すことができる。このアルゴリズムにより0.95以上になる場合クラゲのモデルに力が加わり動くようになる。
【結論】
物理演算シミュレーションを用いることで、海洋生物の柔軟な動きや行動を細かく再現することが可能になる。しかしGrasshopperで複雑な計算を行う場合、極端に解析処理が重くなることがある。そこでアルゴリズムの中でもどの処理に時間がかかるのかを考える必要がある。また、この技術で滑らかに動くシミュレーションを行い、現実に近い動きを見えやすい形で再現することで、視覚に障害がある人でも実物へのイメージを広げ、楽しめる機会を増やすことができる。今後深海エレベーターを実際に視覚障害者の方々に検証実験する予定である。
(論文賞)